PLEXIL Overview¶
10 Apr 2021
What is PLEXIL?¶
Plan execution is a cornerstone in autonomy applications, such as robotics, unmanned vehicles and habitats, and systems or simulations involving intelligent software agents. PLEXIL (PLan Execution Interchange Language) is a language for representing plans for automation.
PLEXIL was designed to meet the requirements of flexible, efficient and reliable plan execution in space mission operations. It is compact, semantically clear, and deterministic given the same sequence of events from the external world. At the same time, the language is quite expressive and can represent branches, loops, time- and event- driven activities, concurrent activities, sequences, and temporal constraints. The core syntax of the language is simple and uniform, making plan interpretation simple and efficient, while enabling the application of validation and testing techniques.
Accompanying PLEXIL is an execution engine, or executive, which implements efficiently the PLEXIL language and provides interfaces to controlled systems as well as decision support systems from which plans may be sent. The PLEXIL software suite also includes a graphical plan execution viewer, a static plan checker, and two different plan simulators.
PLEXIL was originally developed as a collaborative effort between researchers at NASA and Carnegie Mellon University, funded by NASA’s Mars Technology Program through the Research Institute for Advanced Computer Science (RIACS) in the Universities Space Research Association (USRA). Since then it has continually evolved through application on NASA projects, which have included the control of prototype planetary rovers and habitats, drilling equipment, and demonstration of adjustable automation for International Space Station operations. See the References for more information on the background and applications of PLEXIL.
Overview¶
This section is a short overview of the PLEXIL language. It describes abstractly the main features of PLEXIL, and explains how one programs in PLEXIL. The next chapter, PLEXIL Reference, describes in detail the programming constructs of PLEXIL. The Detailed Semantics chapter covers PLEXIL execution in greater depth.
Nodes¶
A PLEXIL plan is built from nodes
Note
nodes were once called actions
A node specifies something to do, either within the plan itself, or to the external world. Nodes are the composable building blocks from which arbitrarily complex behaviors can be specified. There are many kinds of nodes in PLEXIL, and each is a programming construct specifying a certain behavior.
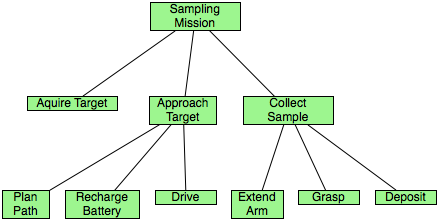
A PLEXIL plan is a tree of nodes with a single root node. This tree represents a hierarchical decomposition of tasks. High level tasks are closer to the root node, while leaf nodes represent primitive behaviors such as assigning to a variable or sending a command to the external system.
The following diagram exemplifies a simple hierarchical plan. Its representation in PLEXIL would have a similar tree structure.
Let’s meet the nodes. The following UML diagram illustrates the essence of PLEXIL.
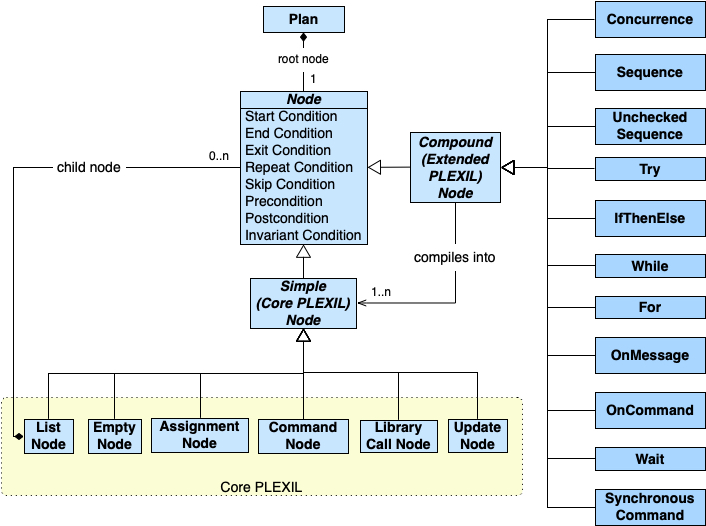
Stacked in a column on the right side of the diagram are the kinds of compound nodes, which specify high level behaviors.
The Concurrence node groups child nodes to be executed in parallel.
The Sequence, Unchecked Sequence, and Try nodes group child nodes to be executed in the order listed, in various different ways.
The IfThenElse, Do, While, and For nodes provide conditional and iterative execution of their child nodes as implied by their names.
The OnMessage and OnCommand nodes are used in multi-executive applications and specify response policies.
Nodes are described in greater detail in the Plexil Reference chapter.
Core PLEXIL¶
The bottom row of nodes in the diagram above are simple nodes and constitute a subset of the language called Core PLEXIL. These six nodes provide all the computational power of PLEXIL. In fact, all the compound nodes described above and shown on the right side of the diagram are translated into a tree of simple nodes prior to execution. Only Core PLEXIL is directly executed by the PLEXIL executive; the final plan executed is a single tree of simple nodes.
Historical note: Originally, Core PLEXIL was the entire PLEXIL language. Core PLEXIL was too primitive to write non-trivial plans, so it was extended with higher level constructs, essentially “macros” that translated into Core PLEXIL for execution; this extended language was called Extended PLEXIL. Today, the full language is simply called PLEXIL (or Plexil).
There are six types of nodes comprising Core PLEXIL. The interior nodes in a plan are List nodes. List nodes have child nodes (or “children”) which can be of any type. A List node is called the parent node (or “parent”) of its child nodes. The remaining nodes are leaf nodes in a plan.
An empty node can contain only attributes and performs no action.
An assignment node performs a local computation, whose value is assigned to a variable.
A command node issues commands to the system being operated on.
An update node provides information to the planning and decision-support interface.
A library call node invoke nodes located in an external library.
Conditions¶
A node can specify up to eight conditions, which determine its execution and outcome. There are nominal control conditions that specify when the node should start executing, when it should finish executing, when it should be repeated, and when it can be “skipped”. These are referred to collectively as the node’s gate conditions.
A start condition specifies when the node should start execution.
An end condition specifies when the node should finish its execution.
A repeat condition specifies when the node should be made eligible for a repeat execution.
A skip condition specifies when the node’s execution should be bypassed altogether.
Next, there are failure conditions that identify when execution is not successful, and these are referred to collectively as a node’s check conditions.
A precondition is checked immediately after the start condition becomes true. If this check fails, the node will be aborted and have an outcome of failure. Preconditions are often used to verify that it is “safe” to execute the node.
A postcondition is checked after the node has completed execution. If this check fails, the node has an outcome of failure. Postconditions are often used to verify that a node had the intended effect.
An invariant condition is checked during node execution, and if it fails at any point, the node will be aborted and have an outcome of failure. Invariant conditions are often used to monitor conditions that are needed for the safe continued execution of the node.
Finally, there is a condition that says when to terminate a node “prematurely” (i.e. before its end condition is satisfied), though intentionally.
An exit condition is checked during node execution, and if it is satisfied at any point, the node will be terminate with an outcome of INTERRUPTED. The Exit condition can be used to effect deliberate plan cancellation. It is effectively the dual of the Invariant condition, which when false has the same effect but with a failure outcome.
Each condition specifies a logical expression. PLEXIL employs a ternary logic in which logical expressions evaluate to one of True, False, or Unknown.
Variables¶
A node may declare variables, which have lexical scope, i.e. they are accessible to the node and all its descendants, but not siblings or ancestors. Access to variables (for reading or writing) can be restricted by use of interfaces in nodes. Interfaces are described in the next chapter.
State, Outcome, and Introspection¶
A node is always in one of seven states, and always terminates with one of four outcomes. The exact semantics for this behavior in Core PLEXIL is given in the Node State Transition Diagrams. A node can (e.g. in one of its conditions) query the state and outcome of itself, its parent, children, and siblings, but no other nodes; it can also query the start and end times of any given state of these nodes.
External World¶
PLEXIL reads the state of the external world or system through lookups, which come in several varieties. PLEXIL can affect the state of the external world or system through commands, which are sent asynchronously.
Time¶
Time (durations, elapsed time, clock time, etc) is often an essential
concept in automated and simulated systems. PLEXIL has no native concept
of time, per se. Time in PLEXIL is just another external state, and
PLEXIL has predefined the state named time for its operations that
involve time. The expressions in PLEXIL that imply time, i.e. those
that give the start and end times of node states, rely on the time
external variable, which at present is a unitless real number.
Resources¶
PLEXIL has a simple resource model, described in detail in Resource Model. In short, resource requirements for commands (only) can be specified in command nodes, and these requirements are checked during execution via a resource arbitration mechanism. Simple models of unary, non-unary, hierarchical, and renewable resources are supported.
Programming in PLEXIL¶
Standard Plexil¶
There are several means of programming in PLEXIL. The executable form of PLEXIL is its XML representation. While many external applications have generated PLEXIL code in its XML form, the XML form is not practical for authoring PLEXIL directly.
The standard programming syntax for PLEXIL is described in this manual. It is simply called Plexil, or sometimes standard Plexil. A translator for Plexil, which converts user programs into Core PLEXIL XML, is described in the next chapter.
Note that the terms “PLEXIL” and “Plexil” can refer to the abstract PLEXIL language (nodes) and/or to its standard programming syntax.
PLEXIL and XML¶
As mentioned in the previous section, the executable form of PLEXIL is represented in XML (Extensible Markup Language), a widely used standard for information modeling. Although a PLEXIL user does not normally need to be concerned with XML, it is important to note that the formal specification of PLEXIL’s syntax is given at the XML level. Core PLEXIL is specified by XML schemas. More information about PLEXIL XML is given in the chapter titled PLEXIL, XML, and Emacs.
The PLEXIL Community¶
If you have problems installing or using PLEXIL, find bugs in it, or have feature requests, please open an issue at https://github.com/plexil-group/plexil/issues.
If you have questions about PLEXIL, please contact the support team
at plexil-support (at) groups (dot) io.